First Layer Robotics
Mobile robotics teams rebuild the same low-level infrastructure — motor control, encoder acquisition, power distribution, embedded firmware and host communication — for almost every new platform. We build those foundational layers once, properly, so you don’t have to.
A USB-connected motion subsystem that runs under any Linux host or ROS 2 stack, including NVIDIA Jetson and Raspberry Pi — integrating motor control, wheel-velocity PID, kinematics, power distribution and a hardware safety architecture in a single robotics-native platform.
All built on ORCP — an open protocol with ready-to-use Python and ROS 2 libraries — so you're sending velocity commands within minutes, not weeks.
Why Motion Core?
Every team solves motor control, encoder timing, power sequencing and safety from scratch — burning months on infrastructure that has nothing to do with what makes their robot unique. Motion Core hands you that foundation as a characterised, serialised, protocol-compliant module, so your engineering time goes into your application, not your low-level stack.
Reduce Repeated Engineering
Replace bespoke motor-control electronics and custom firmware with a reusable robotics motion subsystem.
Accelerate Robot Bring-Up
Move faster from prototype wiring and low-level integration to a functioning mobile robot platform.
Focus On Autonomy
Let robotics teams focus on perception, controls, navigation and application behaviour rather than embedded infrastructure.
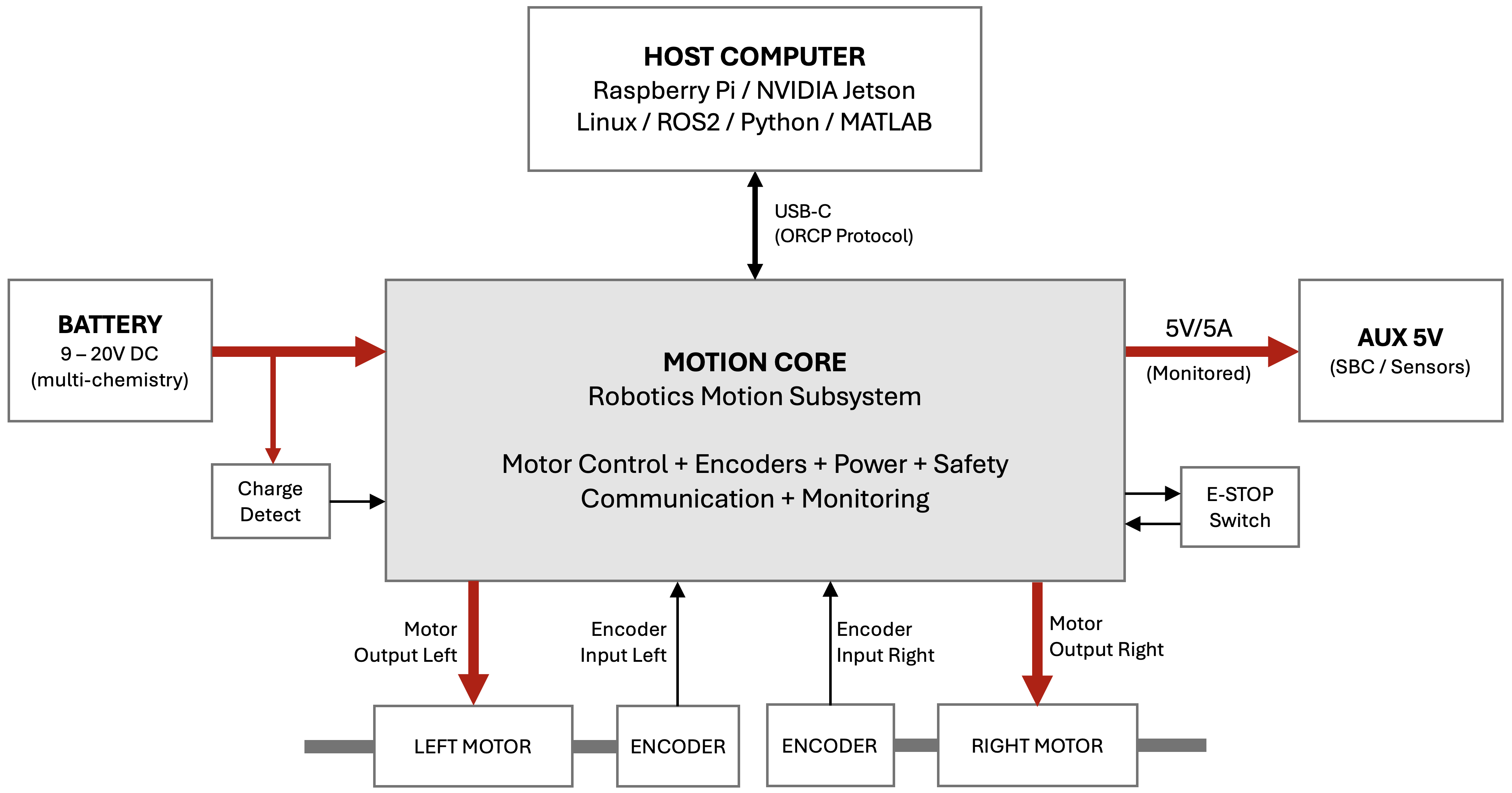
Typical System Architecture
Motion Core sits between the host computer and the robot’s motors and power system, providing a complete motion subsystem over a single USB connection.
Key Capabilities
Single USB Integration
One cable from host SBC to motion subsystem. No bespoke embedded layer to build, debug or maintain.
Differential-Drive Control
On-board wheel velocity PID, encoder acquisition and kinematics for differential-drive robots.
Open Protocol
ORCP (Open Robotics Communication Protocol) provides a clean abstraction between software and motion hardware.
Robotics-Native Software
Designed for Python, ROS 2 and MATLAB integration — not just low-level register or PWM control.
Integrated Power Architecture
Multi-chemistry battery monitoring, 5 V / 5 A auxiliary output and current monitoring for SBCs and sensors.
Safety-Oriented Design
Hardware E-stop, safe-start interlock and motor-disable logic designed in from the architecture upward.
Join the early access programme
Motion Core is launching to a limited group of early-access partners ahead of general availability. We’re working with robotics developers, university labs, integrators and startups building differential-drive mobile robots.
Register to receive launch updates, early-access availability and the Motion Core spec sheet.